
Struktura dhe dizajni i një automjeti të pastër elektrik është i ndryshëm nga ai i një automjeti tradicional me motor me djegie të brendshme. Është gjithashtu një inxhinieri komplekse e sistemit. Ajo duhet të integrojë teknologjinë e baterive të energjisë, teknologjinë e drejtimit të motorit, teknologjinë e automobilave dhe teorinë moderne të kontrollit për të arritur një proces kontrolli optimal. Në planin e zhvillimit të shkencës dhe teknologjisë së automjeteve elektrike, vendi vazhdon t'i përmbahet planit të kërkimit dhe zhvillimit të "tre vertikale dhe tre horizontale", dhe më tej thekson kërkimin mbi teknologjitë kryesore kryesore të "tre horizontale" sipas strategjisë së transformimit teknologjik të "Drejtim i pastër elektrik", domethënë hulumtimi mbi motorin e ngasjes dhe sistemin e tij të kontrollit, baterinë e energjisë dhe sistemin e tij të menaxhimit, dhe sistemin e kontrollit të grupit të fuqisë. Çdo prodhues i madh formulon strategjinë e tij të zhvillimit të biznesit sipas strategjisë kombëtare të zhvillimit.
Autori rendit teknologjitë kryesore në procesin e zhvillimit të një grupi të ri energjie, duke ofruar një bazë teorike dhe referencë për projektimin, testimin dhe prodhimin e njësisë së fuqisë. Plani është i ndarë në tre kapituj për të analizuar teknologjitë kryesore të lëvizjes elektrike në grupin e fuqisë së automjeteve të pastra elektrike. Sot, së pari do të prezantojmë parimin dhe klasifikimin e teknologjive të lëvizjes elektrike.
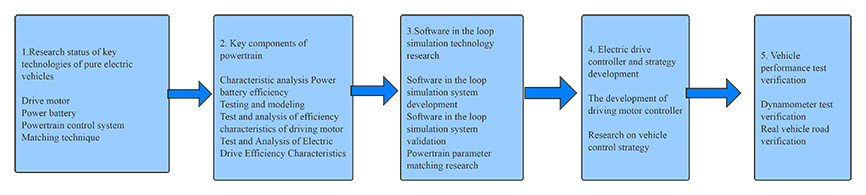
Figura 1 Lidhjet kryesore në zhvillimin e fuqisë
Aktualisht, teknologjitë kryesore kryesore të motorit të pastër të automjeteve elektrike përfshijnë katër kategoritë e mëposhtme:
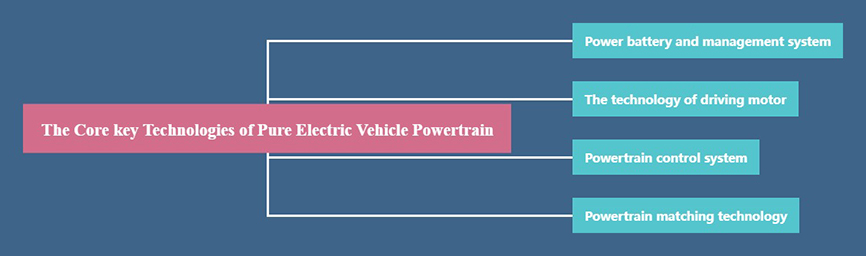
Figura 2 Teknologjitë kryesore kryesore të fuqisë
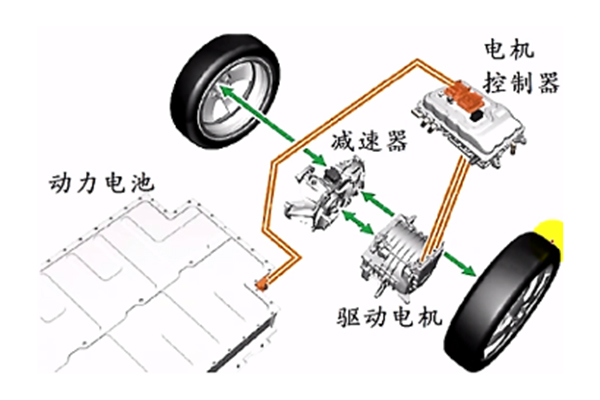
Përkufizimi i sistemit motorik të drejtimit
Sipas statusit të baterisë së fuqisë së automjetit dhe kërkesave të fuqisë së automjetit, ai konverton prodhimin e energjisë elektrike nga pajisja e gjenerimit të energjisë për ruajtjen e energjisë në bord në energji mekanike, dhe energjia transmetohet në rrotat lëvizëse përmes pajisjes transmetuese dhe pjesëve. e energjisë mekanike të automjetit konvertohet në energji elektrike dhe kthehet përsëri në pajisjen e ruajtjes së energjisë kur automjeti frenon. Sistemi elektrik i drejtimit përfshin motorin, mekanizmin e transmisionit, kontrolluesin e motorit dhe komponentë të tjerë. Dizajni i parametrave teknikë të sistemit të drejtimit të energjisë elektrike përfshin kryesisht fuqinë, çift rrotullues, shpejtësinë, tensionin, raportin e reduktimit të transmetimit, kapacitetin e furnizimit me energji elektrike, fuqinë dalëse, tensionin, rrymën, etj.

1) Kontrolluesi i motorit
I quajtur gjithashtu inverter, ai ndryshon hyrjen e rrymës direkte nga paketa e baterisë së energjisë në rrymë alternative. Komponentët kryesorë:
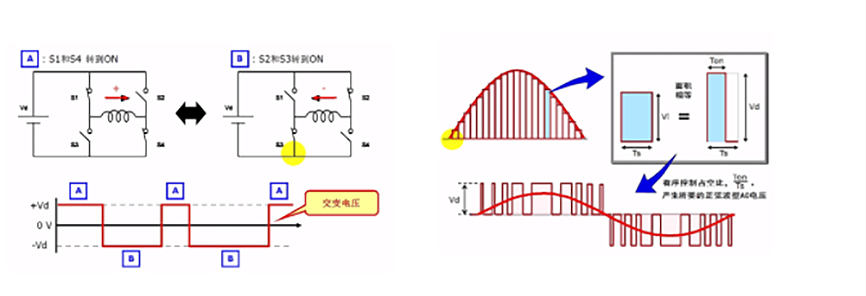
◎ IGBT: çelësi elektronik i fuqisë, parimi: përmes kontrolluesit, kontrolloni krahun e urës IGBT për të mbyllur një ndërprerës të caktuar frekuence dhe sekuence për të gjeneruar rrymë alternative trefazore. Duke kontrolluar çelësin elektronik të energjisë për t'u mbyllur, tensioni alternativ mund të konvertohet. Pastaj voltazhi AC gjenerohet duke kontrolluar ciklin e punës.
◎ Kapaciteti i filmit: funksioni i filtrimit; Sensori aktual: zbulon rrymën e mbështjelljes trefazore.
2) Qarku i kontrollit dhe drejtimit: bordi i kontrollit të kompjuterit, ngarje IGBT
Roli i kontrolluesit të motorit është të konvertojë DC në AC, të marrë çdo sinjal dhe të nxjerrë fuqinë dhe çift rrotullues përkatës. Komponentët kryesorë: çelësi elektronik i fuqisë, kondensator filmi, sensori i rrymës, qarku i drejtimit të kontrollit për të hapur çelësa të ndryshëm, për të formuar rryma në drejtime të ndryshme dhe për të gjeneruar tension të alternuar. Prandaj, ne mund ta ndajmë rrymën alternative sinusoidale në drejtkëndësha. Sipërfaqja e drejtkëndëshave shndërrohet në një tension me të njëjtën lartësi. Boshti x realizon kontrollin e gjatësisë duke kontrolluar ciklin e punës dhe në fund realizon shndërrimin ekuivalent të zonës. Në këtë mënyrë, fuqia DC mund të kontrollohet për të mbyllur krahun e urës IGBT në një ndërprerës të caktuar frekuence dhe sekuence përmes kontrolluesit për të gjeneruar energji AC trefazore.
Aktualisht, komponentët kryesorë të qarkut të lëvizjes mbështeten në importe: kondensatorët, tubat e ndërprerës IGBT/MOSFET, DSP, çipat elektronikë dhe qarqet e integruara, të cilat mund të prodhohen në mënyrë të pavarur, por kanë kapacitet të dobët: qarqe speciale, sensorë, lidhës, të cilët mund të prodhuar në mënyrë të pavarur: furnizime me energji elektrike, dioda, induktorë, pllaka qarku me shumë shtresa, tela të izoluar, radiatorë.
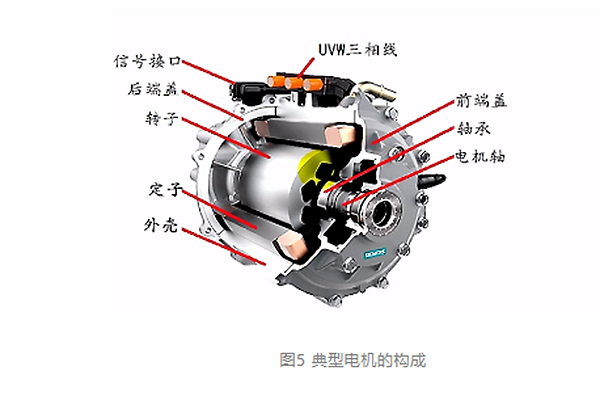
3) Motori: shndërroni rrymën alternative trefazore në makineri
◎ Struktura: mbulesat fundore të përparme dhe të pasme, guaskat, boshtet dhe kushinetat
◎ Qarku magnetik: bërthama e statorit, bërthama e rotorit
◎ Qarku: mbështjellja e statorit, përcjellësi i rotorit
4) Pajisje transmetuese
Kutia e shpejtësisë ose reduktuesi transformon shpejtësinë e prodhimit të çift rrotullues nga motori në shpejtësinë dhe çift rrotullues të kërkuar nga i gjithë automjeti.
Lloji i motorit drejtues
Motorët lëvizës ndahen në katër kategoritë e mëposhtme. Aktualisht, motorët me induksion AC dhe motorët sinkron me magnet të përhershëm janë llojet më të zakonshme të automjeteve elektrike me energji të re. Pra, ne fokusohemi në teknologjinë e motorit me induksion AC dhe motorit sinkron me magnet të përhershëm.
| Motor DC | Motori me induksion AC | Motor sinkron me magnet të përhershëm | Motori me ngurrim me ndërprerje | |
| Avantazhi | Kosto më e ulët, kërkesat e ulëta të sistemit të kontrollit | Kosto e ulët, Mbulim i gjerë i energjisë, Teknologji e zhvilluar e kontrollit, Besueshmëri e lartë | Dendësi e lartë e fuqisë, efikasitet i lartë, madhësi e vogël | Strukturë e thjeshtë, kërkesa të ulëta të sistemit të kontrollit |
| Disavantazhi | Kërkesa të larta për mirëmbajtje, shpejtësi të ulët, çift rrotullues të ulët, jetëgjatësi të shkurtër | Zonë e vogël efikase Dendësi e ulët e fuqisë | Kosto e lartë Përshtatshmëri e dobët mjedisore | Luhatje e madhe çift rrotullues Zhurmë e lartë pune |
| Aplikimi | Makinë elektrike e vogël ose mini me shpejtësi të ulët | Automjete elektrike të biznesit dhe makina pasagjerësh | Automjete elektrike të biznesit dhe makina pasagjerësh | Automjete me fuqi përzierjeje |
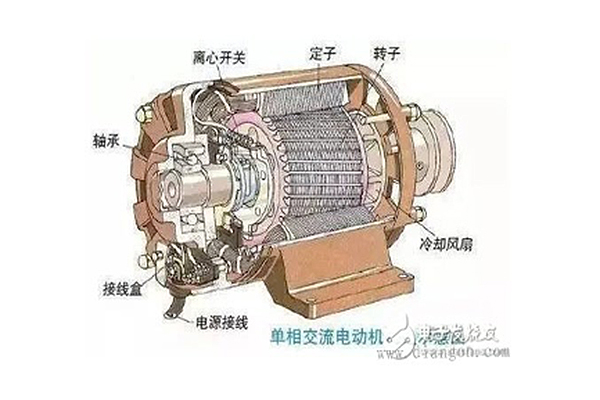 1) Motori asinkron me induksion AC
1) Motori asinkron me induksion AC
Parimi i punës së një motori asinkron induktiv AC është që dredha-dredha do të kalojë përmes çarjes së statorit dhe rotorit: ajo grumbullohet nga fletë të hollë çeliku me përçueshmëri të lartë magnetike. Energjia elektrike trefazore do të kalojë përmes dredha-dredha. Sipas ligjit të induksionit elektromagnetik të Faradeit, do të krijohet një fushë magnetike rrotulluese, e cila është arsyeja pse rotori rrotullohet. Tre mbështjelljet e statorit janë të lidhura në një interval prej 120 gradë, dhe përcjellësi që mbart rrymë gjeneron fusha magnetike rreth tyre. Kur furnizimi me energji trefazor zbatohet në këtë rregullim të veçantë, fushat magnetike do të ndryshojnë në drejtime të ndryshme me ndryshimin e rrymës alternative në një kohë të caktuar, duke gjeneruar një fushë magnetike me intensitet të njëtrajtshëm rrotullues. Shpejtësia e rrotullimit të fushës magnetike quhet shpejtësi sinkrone. Supozoni se brenda është vendosur një përcjellës i mbyllur, sipas ligjit të Faradeit, për shkak se fusha magnetike është e ndryshueshme, laku do të ndjejë forcën elektromotore, e cila do të gjenerojë rrymë në lak. Kjo situatë është njësoj si laku i rrymës në fushën magnetike, duke gjeneruar forcë elektromagnetike në lak dhe Huan Jiang fillon të rrotullohet. Duke përdorur diçka të ngjashme me një kafaz ketri, një rrymë alternative trefazore do të prodhojë një fushë magnetike rrotulluese përmes statorit dhe rryma do të induktohet në shiritin e kafazit të ketrit të shkurtuar nga unaza fundore, kështu që rotori fillon të rrotullohet, që është pse motori quhet motor induksioni. Me ndihmën e induksionit elektromagnetik në vend që të lidhet drejtpërdrejt me rotorin për të nxitur energjinë elektrike, thekonet e bërthamës së hekurit izolues mbushen në rotor, në mënyrë që hekuri me përmasa të vogla të sigurojë humbjen minimale të rrymës vorbull.
2) Motor sinkron AC
Rotori i motorit sinkron është i ndryshëm nga ai i motorit asinkron. Magneti i përhershëm është instaluar në rotor, i cili mund të ndahet në llojin e montuar në sipërfaqe dhe llojin e ngulitur. Rotori është bërë nga fletë çeliku silikoni, dhe magneti i përhershëm është i ngulitur. Statori është gjithashtu i lidhur me një rrymë alternative me një diferencë fazore prej 120, e cila kontrollon madhësinë dhe fazën e rrymës alternative të valës sinus, në mënyrë që fusha magnetike e krijuar nga statori të jetë e kundërt me atë të gjeneruar nga rotori, dhe magnetike fusha po rrotullohet. Në këtë mënyrë, statori tërhiqet nga një magnet dhe rrotullohet me rotorin. Cikli pas cikli gjenerohet nga thithja e statorit dhe rotorit.
Përfundim: Lëvizja motorike për automjetet elektrike në thelb është bërë e zakonshme, por nuk është e vetme, por e larmishme. Çdo sistem lëvizës motorik ka indeksin e tij gjithëpërfshirës. Çdo sistem aplikohet në makinën ekzistuese të automjetit elektrik. Shumica e tyre janë motorë asinkronë dhe motorë sinkron me magnet të përhershëm, ndërsa disa përpiqen të ndërrojnë motorët me ngurrim. Vlen të theksohet se motori integron teknologjinë e elektronikës së energjisë, teknologjinë mikroelektronike, teknologjinë dixhitale, teknologjinë e kontrollit automatik, shkencën e materialeve dhe disiplina të tjera për të pasqyruar aplikimin gjithëpërfshirës dhe perspektivat e zhvillimit të disiplinave të shumta. Është një konkurrent i fortë në motorët e automjeteve elektrike. Për të zënë një vend në të ardhmen e automjeteve elektrike, të gjitha llojet e motorëve duhet jo vetëm të optimizojnë strukturën e motorit, por edhe të eksplorojnë vazhdimisht aspektet inteligjente dhe dixhitale të sistemit të kontrollit.
Koha e postimit: Jan-30-2023


